【编者按】为了加强高层次创新人才的培养,全面提高研究生教育特别是博士生教育质量,本栏目将陆续推出行业优秀博士学位论文及北京工业大学优秀博士学位论文,介绍学术成果,展示我校博士风采,激励北工大研究生潜心研究,努力奋进,不断创新,为学校“双一流”建设作出自己的贡献!
本期专访人物——控制科学与工程学科博士研究生 伍小龙。

一、基本信息
论文中文题目:城市污水处理过程自组织滑模控制研究
论文英文题目:THE RESEARCH ON SELF-ORGANIZED SLIDING CONTROL METHODS FOR MUNICIPAL WASTEWATER TREATMENT
所获奖励名称:2020年中国自动化学会优秀博士学位论文奖
作 者:伍小龙
指导教师:韩红桂 教授
培养院系:信息学部
学 科:控制科学与工程
研究体会:书山有路勤为径,学海无涯苦作舟。
二、研究背景与意义
城市污水处理过程控制是保证出水水质达标、提高处理效率的重要手段,其基本思想是:通过及时获取运行过程数据,利用控制方法对风机、回流泵、加药泵等进行调节,达到期望的运行效果。然而,由于城市处理包含物理处理、生物处理和化学处理等过程,其过程控制面临巨大的挑战,主要体现在:1) 影响城市污水处理过程状态的因素众多且相互影响,城市污水处理过程机理异常复杂,缺少精确的机理模型。2) 城市污水处理过程变量难以实时检测,尤其是关键水质参数总磷(TP)、氨氮(NH4-N)等无法在线检测,缺少足够的运行状态信息。3) 城市污水处理过程入水只能被动接受,入水流量、成份、污染物种类、有机物浓度等波动较大,是一个典型的多干扰非线性动态系统,且始终运行于非平稳状态。因此,如何精确识别城市污水处理过程状态,利用有效的过程控制方法实现过程变量的稳定精准控制,仍然是当前城市污水处理过程控制研究的热点和难点。
三、主要研究内容与创新点
本论文的主要研究内容和创新性成果表现在以下几个方面:
(1) 关键水质参数的智能检测模型设计
针对出水TP、出水NH4-N等关键水质参数难以在线精确检测的问题,文中设计了一种基于自组织模糊神经网的关键水质参数智能检测模型(如图1所示)。首先,通过最小二乘法提取关键水质参数的相关变量,确定智能检测模型的输入输出变量;其次,基于模型结构风险评价指标优化模型结构,同时更新模型的结构和参数,提高了智能检测模型的精度;最后,分析出智能检测模型的收敛条件,并给出了结构优化算法的收敛条件下参数选择的准则,确保模型的成功应用,实际应用结果显示所提出的智能检测模型具有较好的实时性和检测精度。
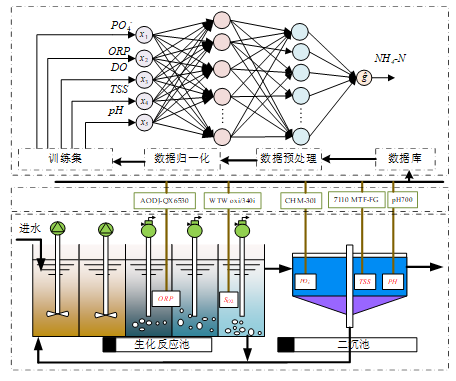
图1 出水NH4-N的在线检测方法设计
(2) 城市污水处理过程鲁棒滑模控制器设计
针对城市污水处理过程存在严重的外部和内部扰动问题,论文提出了一种城市污水处理过程鲁棒滑模控制方法。首先,设计出外部鲁棒控制器,基于自适应趋近率完成滑模控制律的求解,实现了控制过程的快速收敛和外部干扰的抑制;其次,设计出内部鲁棒控制器,基于模糊神经网络完成内部干扰动态特征的提取,形成内部鲁棒控制律,确保内部干扰下系统的鲁棒性;最后,通过构造李雅普诺夫函数,完成了鲁棒滑模控制器的性能分析。典型非线性系统和城市污水处理过程硝态氮控制的应用效果表明,鲁棒滑模控制器不仅能够在内部和外部干扰作用下保持稳定的控制性能,而且具有收敛速度快的优势。
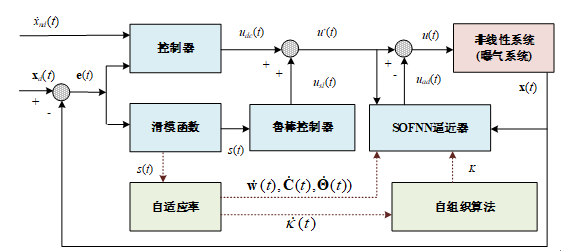
图 2 城市污水处理过程鲁棒滑模控制器设计
(3) 城市污水处理过程自组织滑模控制器设计
针对城市污水处理过程中存在严重的非线性和不确定性问题,论文提出了一种城市污水处理过程单变量自组织滑模控制器(如图2所示),实现了溶解氧浓度的精准控制。首先,利用控制器的跟踪误差和结构风险,设计控制器性能评价指标,并根据评价结果优化控制器结构,减轻自组织滑模抖振现象;其次,采用自适应投影算法对控制器的参数进行更新,提高控制响应速度;最后,在控制器固定结构和自适应结构阶段,分别分析了控制器的稳定性和收敛性,同时给出了自适应参数设置方法,以确保自组织滑模控制器的成功应用。典型非线性系统和城市污水处理过程溶解氧控制的应用效果表明,单变量自组织滑模控制器不仅能够保持平稳精准的跟踪控制性能,还在动态设定点跟踪控制时具有较快的控制响应。
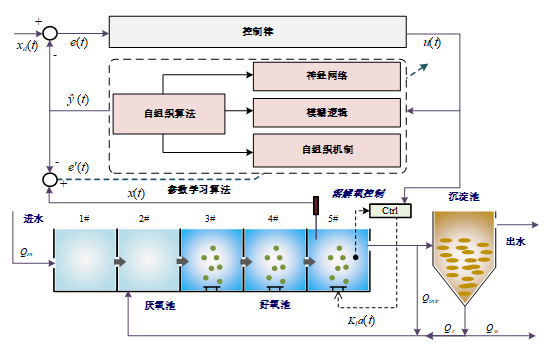
图 3 城市污水处理过程鲁棒滑模控制器设计
四、代表性创新成果
[1] Wu Xiaolong, Han Honggui, Qiao Junfei. Data-driven intelligent warning method for membrane fouling, IEEE Transactions on Neural Networks and Learning Systems, 2020, DOI: 10.1109/TNNLS.2019.3041293.
[2] Wu Xiaolong, Han Honggui, Liu Zheng, Qiao Junfei. Data-Knowledge-Based Fuzzy Neural Network for Nonlinear System Identification, IEEE Transactions on Fuzzy Systems, 2020. 28(9): 2209-2221.
[3] Han Honggui, Wu Xiaolong, Qiao Junfei. Design of Robust Sliding Mode Control with Adaptive Reaching Law. IEEE Transactions on Systems Man & Cybernetics. Systems, 2020, 50(11): 4415-4424.
[4] Han Honggui, Wu Xiaolong, Qiao Junfei. An Efficient Optimization Method for Improving Generalization Performance of Fuzzy Neural Networks. IEEE Transactions on Fuzzy Systems, 2019, 27(7): 1347-1361.
[5] Han Honggui, Wu Xiaolong, Zhang Lu, Qiao Junfei. Self-Organizing RBF Neural Network Using an Adaptive Gradient Multi-Objective Particle Swarm Optimization. IEEE Transactions on Cybernetics, 2019, 26(1): 612-625.
[6] Han Honggui, Wu Xiaolong, Qiao Junfei. A Self-Organizing Sliding Mode Control for Wastewater Treatment Processes. IEEE Transactions on Control Systems Technology. 2019, 27(4): 1480-1491.
[7] Han Honggui, Wu Xiaolong, Liu Zheng, Qiao Junfei. Design of Self-Organizing Intelligent Controller Using Fuzzy Neural Network. IEEE Transactions on Fuzzy Systems, 2018, 26(5): 3097-3111.
[8] Han Honggui, Wu Xiaolong, Ge Luming, Qiao Junfei. A Sludge Volume Index (SVI) Model Based on the Multivariate Local Quadratic Polynomial Regression Method. Chinese Journal of Chemical Engineering, 2018, 26: 1071-1077.
[9] Han Honggui, Wu Xiaolong, Qiao Junfei. Nonlinear Systems Modeling Based on Self-Organizing Fuzzy-Neural-Network with Adaptive Computation Algorithm, IEEE Transactions on Cybernetics, 2014. 44(4): 554-564.
[10] Han Honggui, Wu Xiaolong, Qiao Junfei. Real-Time Model Predictive Control Using a Self-Organizing Neural Network, IEEE Transactions on Neural Networks and Learning Systems, 2013. 24(9): 1425-1436.
[11] 韩红桂,伍小龙, 张璐,乔俊飞. 城市污水处理过程异常工况识别和抑制研究. 自动化学报,2019,36(6): 865-872.
[12] Wu Xiaolong, Han Honggui, Qiao Junfei A Self-Learning Sliding Mode Controller for Biological Wastewater Treatment System. International Conference on Information, Cybernetics, and Computational Social Systems (ICCSS). 2019.

