【优博风采】北京工业大学优秀博士学位论文获得者:李大鹏
【编者按】
为进一步培养我校研究生创新能力,提高研究生综合素质,促进学校研究生教育内涵发展,特推出“优博风采”专栏,邀请校级及以上优秀博士学位论文获得者分享科研历程与学术体会、展示创新成果与学位论文等,旨在激励我校研究生秉持“不息为体,日新为道”校训精神,潜心研究、锐意创新。

本期专访人物:控制科学与工程学科博士研究生 李大鹏
所获奖励名称:2024年北京工业大学优秀博士学位论文
【山高人为峰、海阔心无界】
“路漫漫其修远兮,吾将上下而求索”。在科研路上,我们需要本着严谨求实的科研态度,严格要求自己,保证科研结果的真实性与严谨性,以一个科研工作者具有的素质时刻提醒自己,约束自己。“积跬步以行千里,积小流以成江海。”科研道路难免遇到各种困难与挑战,我们不应因此放弃,需要不断从失败过程吸取经验教训,总结和完善学习方法,更需要一颗平静之心去对待。日常学习过程中,需要时刻关注相关领域前沿的发展动态和最新成果,掌握从事科学研究的方法,训练科技论文写作的能力,并将专业知识与生产实践相结合。
【博士论文介绍】
论文中文题目:不确定非线性状态约束系统的智能自适应控制
论文英文题目:INTELLIGENT ADAPTIVE CONTROL FOR UNCERTAIN NONLINEAR STATE CONSTRAINED SYSTEMS
作 者:李大鹏
指导教师:乔俊飞 教授
培养单位:信息科学技术学院
学 科:控制科学与工程
论文主要贡献及创新点
实际工程系统不可避免会受到物理结构、系统性能以及安全准则等约束条件限制。一旦违反约束条件势必会造成产品合格率减低和控制性能恶化,甚至引发系统失稳或重大生产事故等。面向实际工程系统的需求,本文针对非线性约束系统的控制问题展开研究,主要创新工作包括:
1.消除现有方法要求状态初始值必须已知且满足约束条件的限制。针对任意初始条件的非线性约束系统,提出了基于延迟转移函数的自适应约束容错控制方法。通过设计的目标转换函数将真实系统状态满足约束条件转换为测量状态满足约束条件。再利用延迟转移函数消除初始状态必须满足约束条件的限制,在此基础上,设计了基于非线性映射函数的自适应神经网络约束控制器,在初始条件未知情况下,保证了系统状态和跟踪误差满足指定约束条件,同时消除了虚拟控制器必须满足指定约束条件限制。
2.解决了现有自适应约束控制器中潜在奇异性问题。针对非线性状态相关约束系统,提出了基于双层约束结构的自适应神经网络控制方法。考虑到现有约束控制方法均采用单层约束结构,当变量接近约束边界时,导致控制器出现奇异性情况,控制输入将趋于无穷大。所提出的双层约束结构控制方法分别采用内层约束边界用于非线性映射函数设计,外层约束边界用于控制器设计,当变量接近约束边界时,避免控制器不会出现奇异情况。所提出的控制方法能够在保证跟踪误差和系统状态满足指定状态相关约束条件的同时,消除控制器潜在奇异性问题。
3.实现污水处理过程安全稳定运行。研究具有执行器故障和饱和的污水处理过程,提出了基于神经网络的自适应延迟约束容错控制方法。利用神经网络的逼近能力,对污水处理过程中未知动态进行在线辨识。构建内回流泵和曝气泵的故障和饱和输入模型。并在此基础上,结合延迟转移函数和非线性映射函数,提出了自适应延迟约束容错控制器,保证硝态氮和溶解氧溶度及它们的跟踪误差始终保持在指定约束范围内,确保出水品质满足相应的排放标准。所提控制方法提高了污水处理过程的可靠性和安全性。
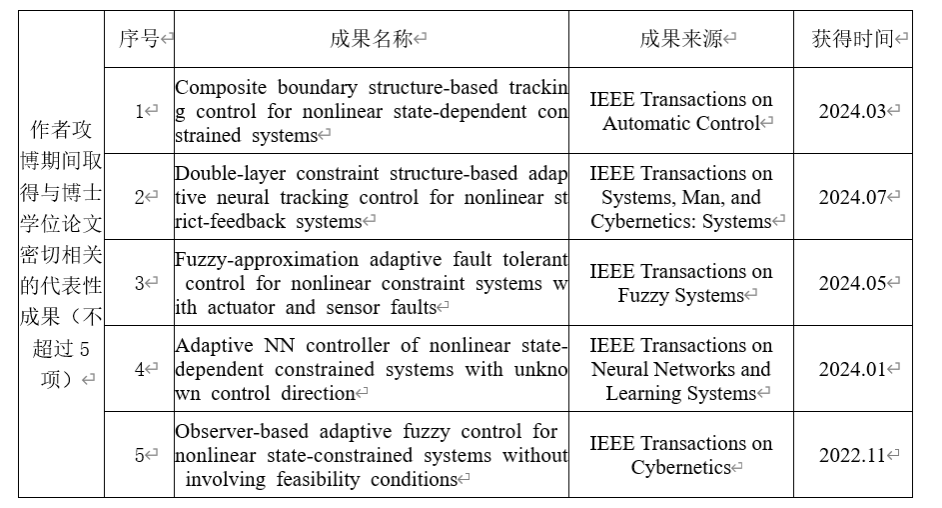
【博士期间代表性科研成果】
【与导师合影】

图文:李大鹏
编辑:胡春瀛
审核:高春娣、杨震

